Ever wanted to try out some awesome microarchitectural attacks but felt like the setup was too much work? Introducing ‘Meltdown in a can’! Just download the tar, run the install script, and now you can ‘go meltdown yourself’!
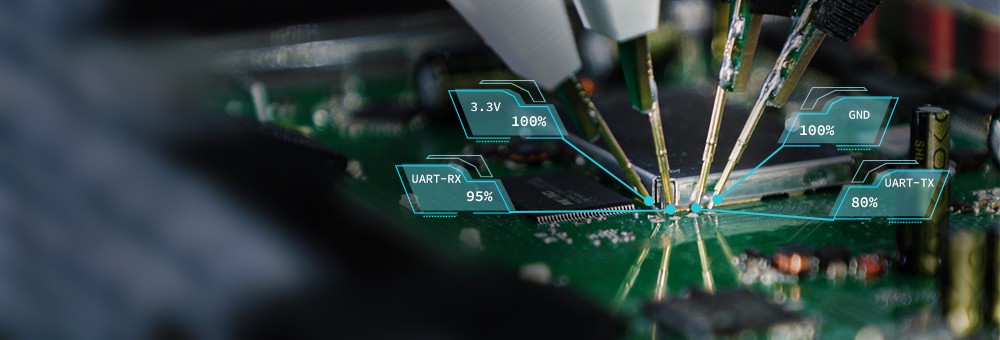
The last part of the PROBoter series showed how innovative algorithms can help an embedded system pentester to analyze recorded voltage signals of an unknown PCB. Besides basic signal characteristics, these algorithms can link signal lines and identify communication buses typically found on PCBs like I2C or SPI. In this final post of the PROBoter series, we draw the big picture of the PROBoter software framework. In parallel to the release of this post, all missing services forming the framework are released on the PROBoter Github repo.
This article is an extension to the SCHUTZWERK blog post series about the PROBoter PCB analysis platform. It introduces the algorithm of the Time Invariant Signal Analysis, which the PROBoter uses to produce information on the functionality of the conducting paths identified on a PCB from passive eavesdropping.
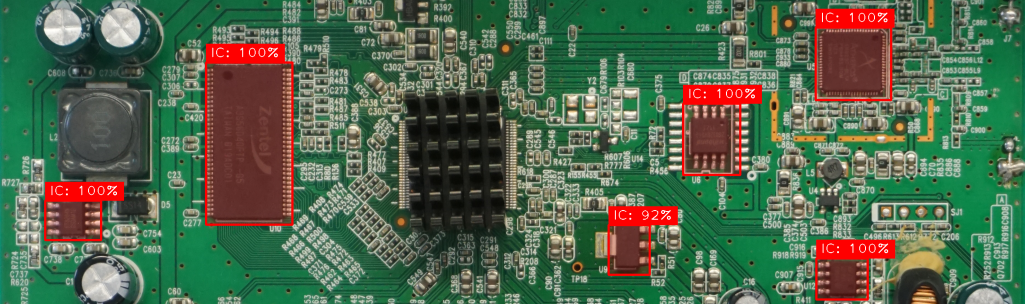
The last part of the PROBoter series introduced the heart of the PROBoter framework - the hardware platform. The platform allows (semi) automated electrical probing of an unknown PCB which is usually a very time consuming and error prone task. This post focuses on methods to automate the initial analysis step of an embedded system - the visual analysis of the PCB(s) forming the device under test.
The PROBoter is a modular, self-calibrating probing machine to support PCB analysis tasks in penetration tests of embedded systems. The video of the PROBoter demonstrates its four main contributions: 1) The automatic visual detection of components and contact points on a PCB, 2) the automatic probing of contact points for net reversing and signal detection, 3) the mapping of signal lines to given bus protocols, and 4) the support in identification of potential attack vectors.
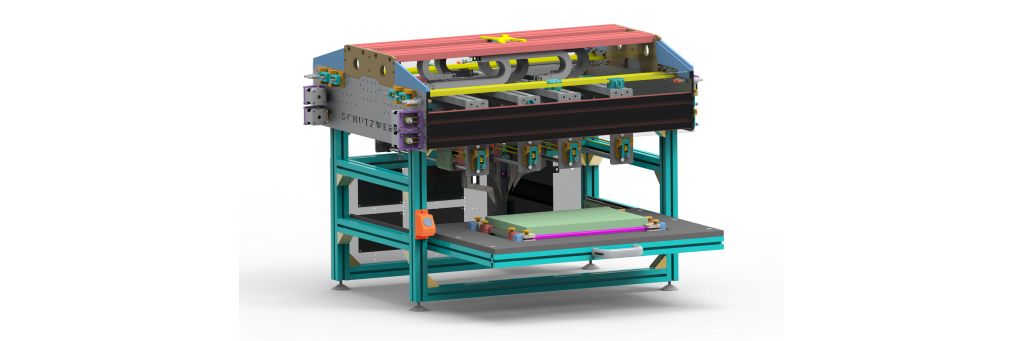
The first part of the PROBoter series gave an introduction to the manual process of embedded system pentesting. It then showed a possible automated workflow which will be implemented in the form of the PROBoter platform. After a longer phase of further internal development and evaluation, this post describes the core component of the PROBoter framework - a hardware platform for automated electrical probing and PCB image generation.
Security analysis of embedded systems on the Printed Circuit Board (PCB) level can be a very tedious and time-consuming task. Many steps like visual PCB inspection and reverse engineering of security relevant nets, i.e. electrically connected components, is usually done manually by an embedded security expert. PROBoter aims at automating this manual analysis.
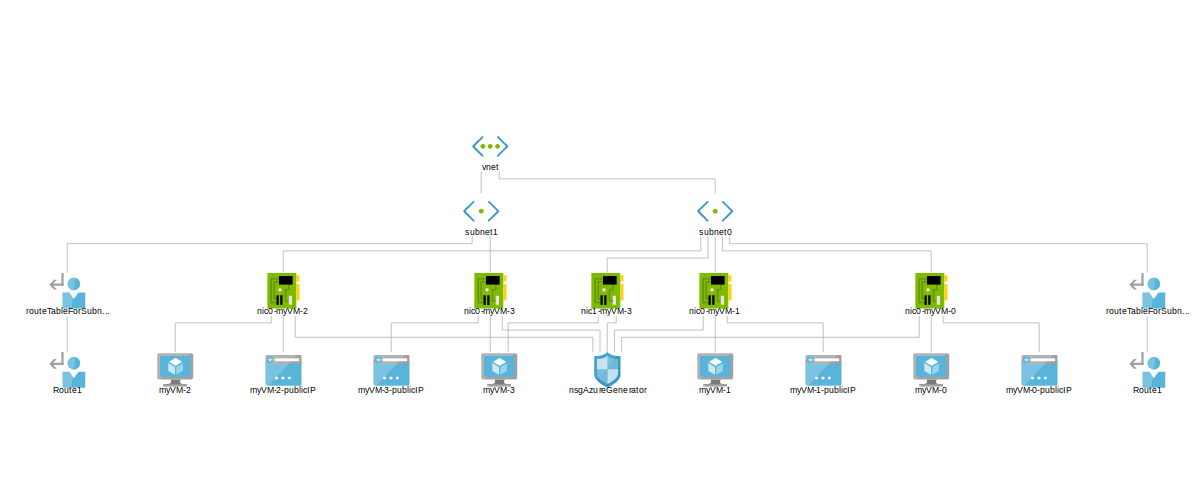
Hands-on practice is an efficient way for penetration testers to gain in-depth knowledge of a certain skill or technology. Providing hands-on practice
requires setting up an environment for test and training purposes. Setting up
a test environment manually can be time-consuming and very frustrating. This is
caused by long installation processes and configuration procedures. Besides that,
setting up big test environments can be expensive due to the necessary
infrastructure or computational power. Developing a solution based on local virtualization is possible, but is still
limited to local resources. Instead, this problem can be solved using cloud computing.
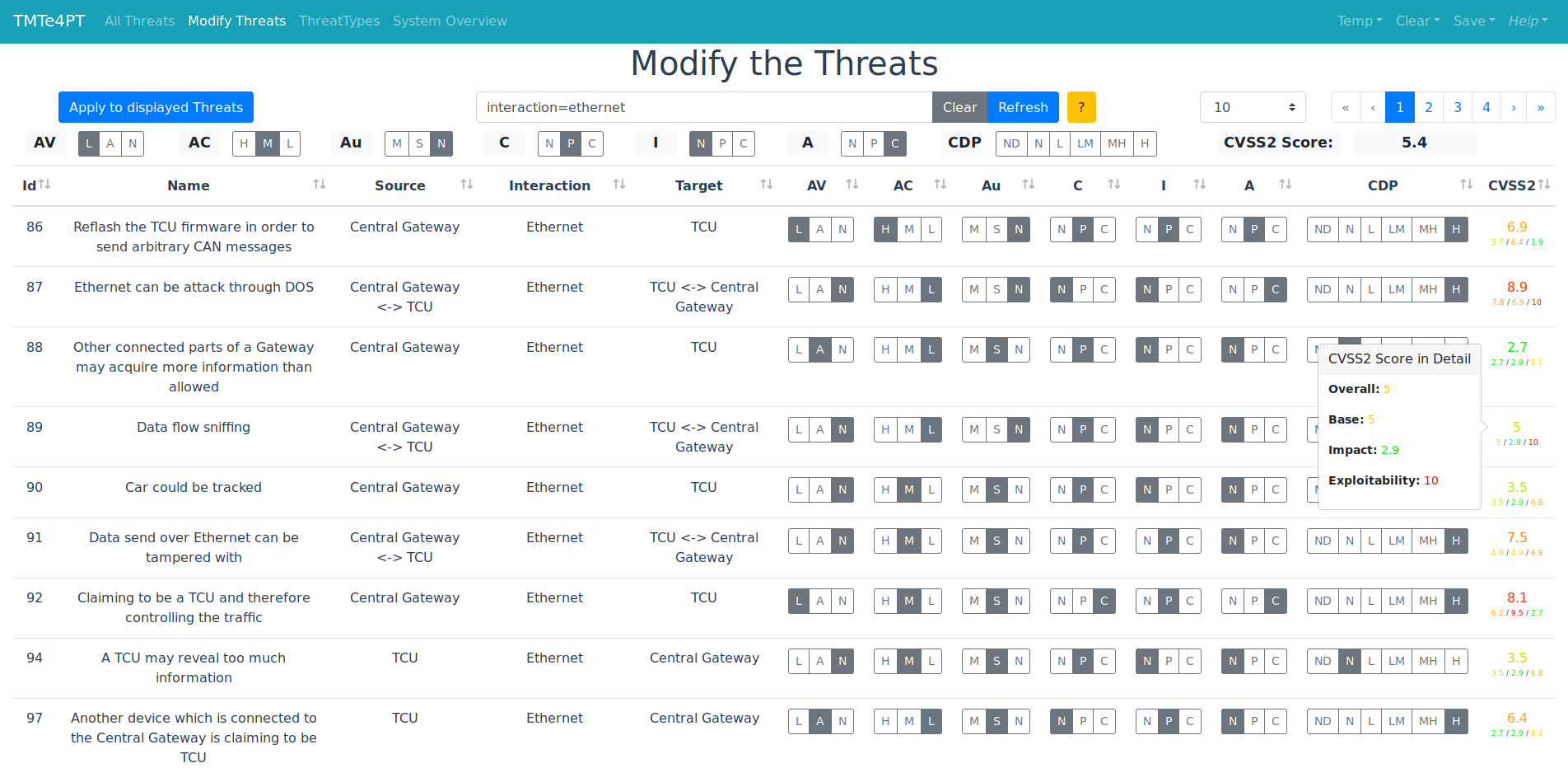
From a traditional point of view, vehicles used to be closed systems in which components communicated between each other over a central vehicle bus and no connection to remote systems was possible. However, this has drastically changed during the last years with increasing connectivity and autonomy of today’s vehicles. While car manufacturers have a long experience in dealing with safety problems, dealing with security risks raised by this development is a relatively new domain for them.
Disclaimer: The elaboration and software project associated to this subject are results of a Bachelor’s thesis created at SCHUTZWERK in collaboration with Aalen University by Philipp Schmied.
While car manufacturers steadily refine and advance vehicle systems,
requirements of the underlying networks increase even further. Striving
for smart cars, a fast-growing amount of components are interconnected
within a single car. This results in specialized and often proprietary
car protocols built based on standardized technology. Most of these
protocols are based on bus protocols: All network nodes within such a
bus network are connected using a single shared data link. This
technology provides a feasible way of real time communication between
several security and comfort systems. However, often no or
insufficient authentication and encryption or other security
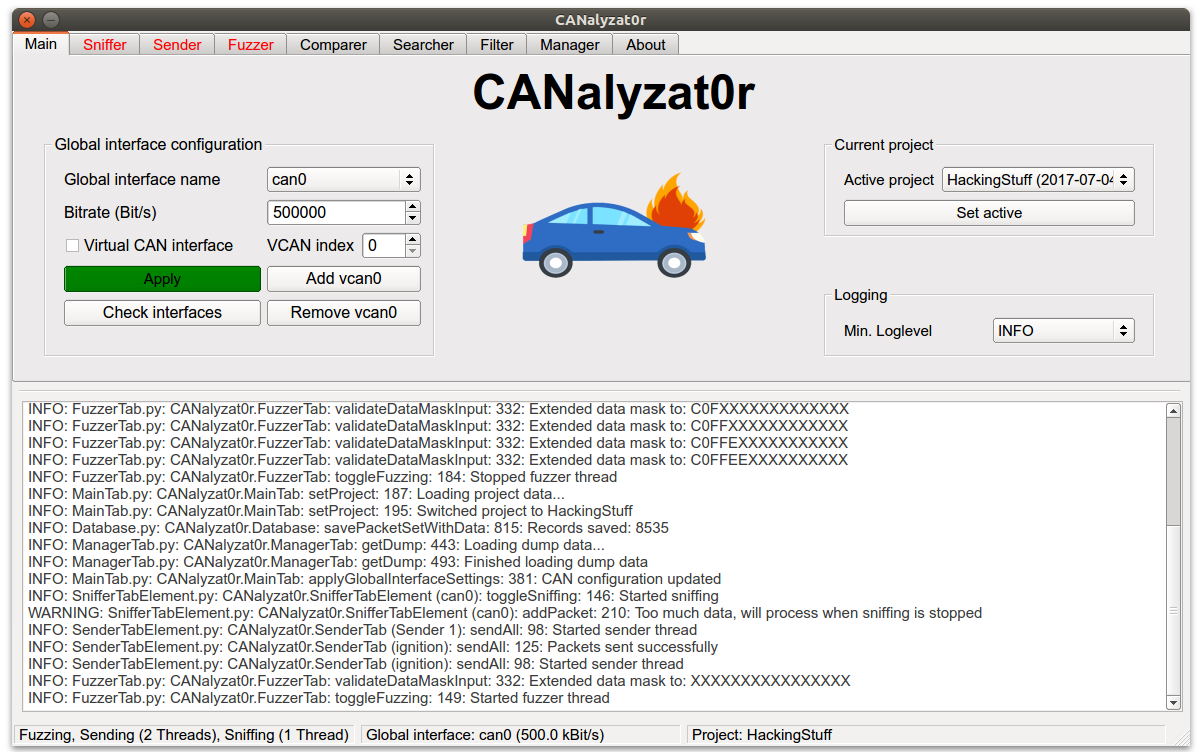
mechanisms can be found in today’s car systems. As described previously, most of the interchanged data structures on a car network
bus, including associated systems, are proprietary. For this reason,
there’s a need for open source, extensible, easy to use and publicly
available software to analyze the security state of such networks and
protocols.